橙色云三大业态
协同创新+研发上云+研发商品化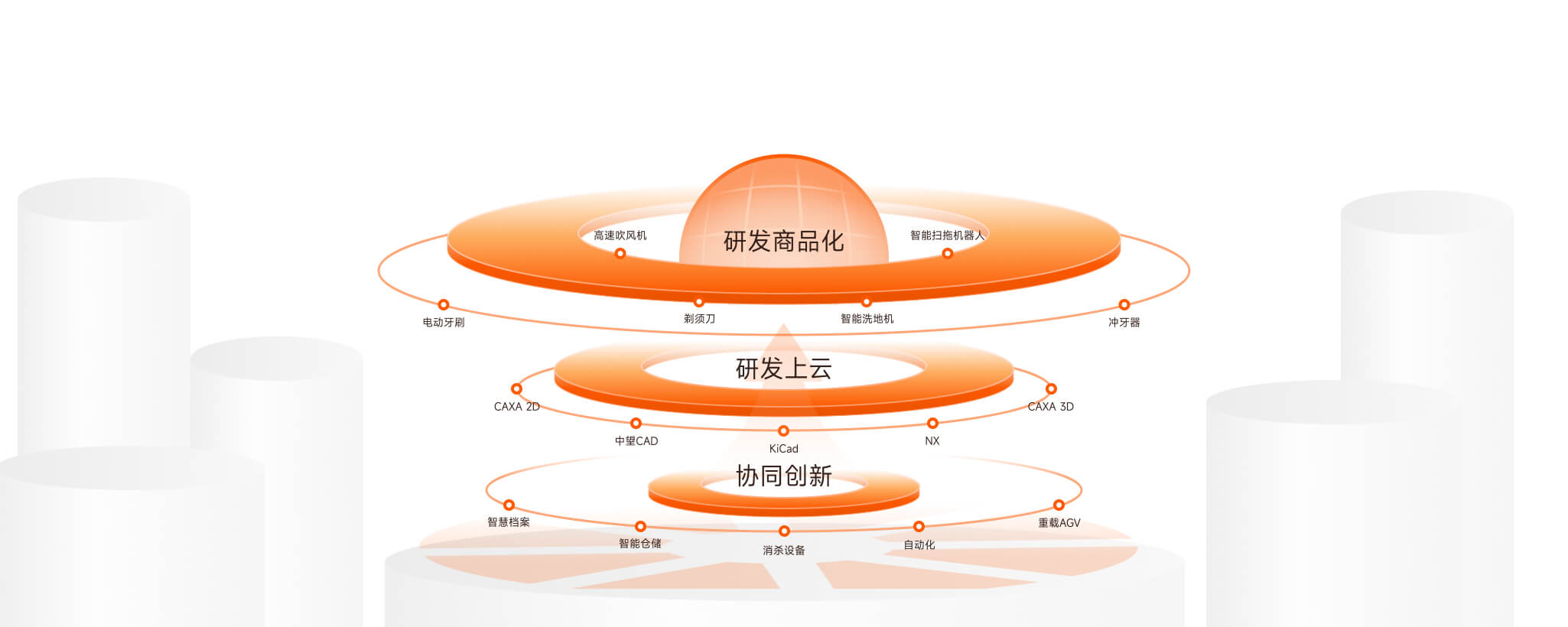
橙色云研发
立即体验成功案例
查看更多


橙色云荣誉
构建开放共赢的云端生态,推动产业互联网建设,助力各行各业实现数字化升级跨行业跨领域工业互联网平台
2022年获评国家级“双跨”工业互联网平台
制造业与互联网融合发展试点示范项目
2022年工信部列入制造业与互联网融合发展示范名单
支持专精特新中小企业高质量发展公共服务示范平台
工信部建议支持的国家或省级中小企业公共服务示范平台
国家级第三批专精特新“小巨人”企业
2021年荣获国家级第三批专精特新“小巨人”企业
国家级重点专精特新“小巨人”企业
第二批第一年建议支持的国家级专精特新“小巨人”企业
山东省第四届“省长杯“工业设计大赛金奖
2022年省长杯金奖
国家级工业设计中心
2021年荣获第五批国家级工业设计中心
高新技术企业
2020年荣获山东省科学技术厅颁发高新技术企业荣誉
省级服务业创新中心
2019年度省级服务业创新中心
省级大数据发展创新平台
山东省大数据发展创新平台
省级中小企业公共服务示范平台
2020年度省级中小企业公共服务示范平台
省级四星数字经济平台(试点)
2020年度山东省四星数字经济平台(试点)
省级大数据“三优两重”项目
2020年度省级大数据“三优两重”项目
省级示范型数字经济园区(试点)
2020年度省级示范型数字经济园区(试点)
省级服务型制造示范平台
山东省服务型制造示范平台
我们的合作伙伴
全球化协同网络
33万+
平台入驻工程师
13000+
项目需求
88亿+
平台项目总金额
30亿+
已成交金额
6个+
海外研发中心
5万+
平台服务入驻企业